محسن بهمنی
مدعی اختراع
ادعای نسل جدید پیشران بر مبنای قانون سوم نیوتون

شاخدار

ادعای شاخدار نسل جدید پیشران بر مبنای قانون سوم نیوتن
اگر وقت ندارید …
- در شبکههای اجتماعی ویدیوهایی منتشر شده که «محسن بهمنی» را مخترعی معرفی میکنند که پیشرانی بدون ملخ و سوخت، بر پایه «قانون سوم نیوتون» ساخته است.
- او مدعی است دستگاهش با «حرکت جرمها روی مسیر حلقهای» و «نیروی گریز از مرکز» میتواند رانش خالص ایجاد کند و خودرو را به پرواز درآورد.
- شرکت سازنده خودروهای لوکس و سوپراسپورت منصوری (Mansory) تنها یک پست تبلیغاتی درباره همکاری مفهومی با او منتشر کرده، بدون هیچ داده فنی یا نمونه پروازی.
- پتنتهای ثبتشده در اروپا و آمریکا فقط اسناد حقوقیاند، نه تأیید فنی؛ هیچ آزمایش مستقل یا پرواز واقعی ارائه نشده است.
- ویدیوهای بهمنی دستگاههایی را نشان میدهد که روی زمین حرکت میکنند، نه در حالت شناور یا آزاد؛ حرکتها حاصل اصطکاک و لرزشاند، نه رانش.
- سازوکار ادعایی با اصول طبیعت بهویژه قانون سوم نیوتون و پایستگی تکانه ناسازگار است و نمیتواند نیروی خالص تولید کند.
- ایده استفاده از «نیروی گریز از مرکز برای رانش» مشابه طرحهای مردود تاریخی مانند Dean Drive است.
- تمام شواهد موجود (پتنت، ویدیو، پوشش رسانهای) جنبه تبلیغاتی دارند و مبنای علمی یا مهندسی قابلتأیید ندارند.
- ادعای «نسل جدید پیشران بر مبنای قانون سوم نیوتون» شبهعلم محسوب میشود.
در شبکههای اجتماعی، ویدیو و پستهای منتشر شده که در آن از فردی بهنام محسن بهمنی به عنوان مخترعی یاد میشود که پیشرانی طراحی کرده که با حرکت جرمها یا موتورهای کوچک روی یک مسیر حلقهبسته و «استفاده از نیروی گریز از مرکز» میتواند نیروی یکطرفه و کافی برای پرواز خودرو تولید کند (بایگانی).

در این پستها یا ویدیوها از زبان آقای بهمنی میشنویم و میخوانیک که این سامانه «با قانون سوم نیوتون» سازگار و «انقلابی» است.

ادعا شده برند اتوموبیلسازی لوکس «منصوری» (Mansory) برای تجاریسازی طرح همکاری دارد. شرکت منصوری نیز پستی در اینباره در وبسایتش منتشر کرده که البته تاریخ انتشار آن مربوط به دو سال پیش است (بایگانی). پست منتشر شده در این سایت هم بیانکننده خبر یک اطلاعیه همکاری است نه گزارش فنی. سایت منصوری هیچ داده آزمایشگاهی، نمودار نیروی خالص یا ویدیو پرواز آزاد حتی با پروتوتایپ کوچک ارائه نمیکند.
وبسایت و صفحات شخصی بهمنی محور همکاری با منصوری را «توسعه فناوری پهپادی و پیشرانی نو، با بازده بالا و ردپای فیزیکی کوچک» معرفی میکند و همان سازوکار حلقه بسته با بلوکهای متحرک را بیان میکند. «پیشران بیپروانه… با حرکت موتورهای کوچک و بلوکهای وزنه روی مسیر حلقوی و ایجاد شتاب گریز از مرکز، نیروی جهتدارتولید میکند» و «با قانون سوم نیوتون سازگار» است.
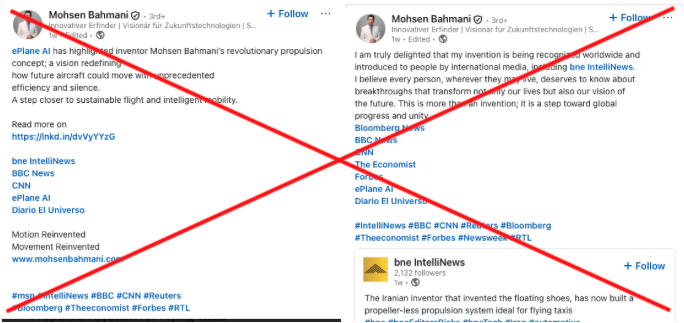
محتوای منتشر شده در رسانه، چه در رسانههای آلمانی و چه ایرانی، بیشتر شبیه رپورتاژ آگهی و تکرار ادعاهای بهمنی است نه راستیازمایی یا امکانسنجی مستقل. برای نمونه متن منتشرشده در «ePlane AI» متنی ستایشآمیز و تکرار روایت مخترع است؛ تحلیل انتقادی و داده آزمایشگاهی ندارد (بایگانی). تصویر منتشرشده در این سایت نیز مربوط به یک پهپاد دیگر است که محصول تجاری یک کمپانی است و ظاهر آن هم نشان می دهد که پیشرانش چگونه است و با ادعای بهمنی، متفاوت است (بایگانی). با اینحال بهمنی این تصویر را در لینکدینش بدون اشاره به نامربوط بودن، بازنشر کردهاست (بایگانی).

مورد دیگر، گزارشی است که در Intellinews منتشر و سپس از سایت اصلی برداشته شد که نشانهای منفی از نظر اعتبار ادعا است (نسخه MSN باقی است، بایگانی) . با اینحال همچنان بعضی رسانههای فارسی زبان در اروپا (مورد۱ و مورد۲) و چند کانال یوتیوب از جمله بامداد اسماعیلی، این ادعا را بازنشر کردهاند (لینک).
همچنین بهمنی در پستهایی در لینکدین، به لیستی از خبرگزاریهای خارجی اشاره کرده اما کلیک روی آن لینکها به صفحه اصلی وبسایت این خبرگزاری ها وارد میشود و تنها وعده انتشار مطلب داده شده و گزارشی منتشر نشدهاست (لینک۱، لینک۲).
بهمنی در صفحه یوتیوب خود ویدیوها و کلیپهای آزمایشی منتشر کردهاست. در کلیپها، دستگاههای نمونه همیشه روی زمین یا سطحی با شیب کم حرکت میکنند؛ هیچ «پرواز عمودی یا تعلیق بیتکیهگاه» دیده نمیشود (بایگانی). ویدیوها بریدهشده و تنها نیمی از حرکت را نشان میدهد. به این صورت که جسم نیمی از مسیر را جلو میرود اما وقتی حرکت بازگشتی آن شروع میشود، ویدیو تقطیع شدهاست (بایگانی). این موضوع از نظر فنی و علمی مهم است. در یکی از ویدیوها بهمنی میگوید مکانیسم «بهطور کامل با قانون سوم نیوتون» سازگار است؛ اما کل نمایشها افقی یا روی سطح شیبدار با زاویه کم است. دو ویدیوی آزمایشی بهطور مشخص همین الگوی حرکت زمینی را نشان میدهند.
https://www.youtube.com/watch?v=Io3yHXm8AjA
https://www.youtube.com/watch?v=jOcQJzqZFws
چند سند ثبت اختراع (پتنت) ثبتشده در آلمان، اروپا و آمریکا با عناوینی نظیر «روش و سامانه تولید نیرو با شتابدادن جسم و استفاده از نیروی گریز از مرکز» (EP3565971B8؛ WO2018091962) و نیز یک پتنت آمریکایی قدیمیتر درباره «ارتعاش دادن جسم با نیروی گریز از مرکز» (US8272283) ثبت شده است. فهرست رسمی نام مخترعان «حسین وفایی» و «محسن بهمنی» را کنار هم دارد.

این خانواده از پتنتها حدود ۱۵ تا ۲۰ سال پیش بهدست فردی بهنام حسین وفایی ثبت شده و در ادامه محسن بهمنی در سالهای اخیر به او پیوسته و همکاری مشترکی دارند. در اینستاگرام بهمنی هم تصویری از او در کنار وفایی و کوروش منصوری دیده میشود که نشان میدهد واقعا کمپانی منصوری به این موضوع توجه ویژه حتی در سطح بنیانگذار شرکت، داشتهاست.

در ادامه، ادعای «نسل جدید پیشران بر مبنای قانون سوم نیوتون» را براساس پتنتهای اروپایی، آمریکایی و جهانی زیر بررسی میکنیم (پتنتهای دیگری در روسیه و اسپانیا و …ثبت شدهاند که به آنها نپرداختیم چون عموما ترجمه همین موارد است):
- عنوان: «Method and system for vibrating an object using centrifugal force» شماره پتنت: US8272283B2، تاریخ انتشار: 2012-09-25، کشور: ایالات متحده گوگل پتنت: https://patents.google.com/patent/US8272283B2/en
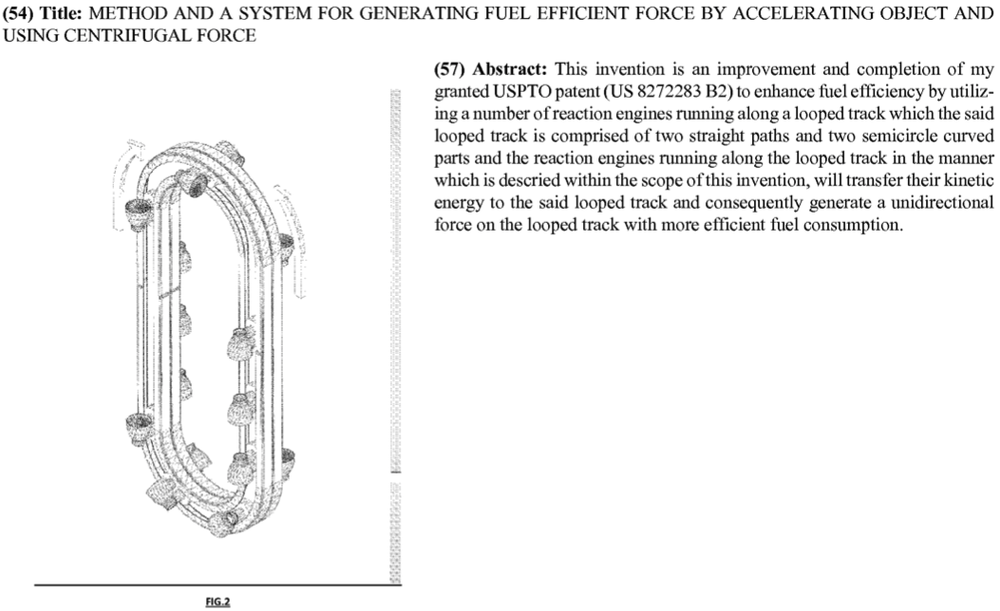
- عنوان: «Method and a system for generating fuel efficient force by accelerating object and using centrifugal force» شماره پتنت: WO2018091962A4، تاریخ انتشار: 2018-09-20، سازمان جهانی مالکیت معنوی (WIPO/PCT) گوگل پتنت: https://patents.google.com/patent/WO2018091962A4/en
- عنوان: «Method and a system for generating fuel efficient force by accelerating object and using centrifugal force» شماره پتنت: EP3565971B8، تاریخ انتشار: 2023-01-25، اروپا (EPO)، گوگل پتنت: https://patents.google.com/patent/EP3565971B8/en
- عنوان: «Method and system for vibrating an object using centrifugal force» شماره پتنت: US20090223323A1، تاریخ انتشار: 2009-09-10، کشور: ایالات متحده گوگل پتنت: https://patents.google.com/patent/US20090223323A1
- عنوان: «Method and a system for generating fuel efficient force by accelerating object and using centrifugal force»، شماره پتنت: EP3565971B8، تاریخ انتشار: 2023-01-25، اروپا (EPO) گوگل پتنت: https://patents.google.com/patent/EP3565971B8/en
نقطه کانونی ادعای پیشران بهمنی-وفایی چیست؟
جستجو برای یافتن روشهای نوین و کارآمدتر در تولید نیروی پیشران، همواره یکی از حوزههای جذاب و در عین حال چالشبرانگیز در مهندسی و فیزیک بوده است. در عصری که کاهش مصرف سوختهای فسیلی و مقابله با بحرانهای زیستمحیطی به یک ضرورت جهانی تبدیل شده، اهمیت دستیابی به فناوریهای پیشرانه پاک و بهینه بیش از هر زمان دیگری احساس میشود. در این میان، هر از گاهی ادعاهایی مطرح میشود که نویدبخش یک تحول بنیادین در این عرصه هستند، اما ارزیابی دقیق علمی بعضی از آنها پیش از هرگونه نتیجهگیری ضروری است.
بر اساس مجموعهای از اسناد ثبت اختراع (پتنت)، از جمله EP3565971B8 و WO2018091962A4 و همچنین یک ویدیوی معرفی در یوتیوب، اختراعی با عنوان «سیستم و روش برای تولید نیروی بهینه از نظر مصرف سوخت» معرفی شده که مخترعان آن را یک «سیستم پیشرانه انقلابی» مینامند. اصل عملکرد این سیستم بر ایدهای به ظاهر ساده استوار است: تولید «نیروی یکطرفه» (Unidirectional Force) از طریق شتابدهی به اجسامی متحرک بر روی یک «مسیر حلقه بسته» (Looped Track) و سپس بهرهبرداری از نیروی گریز از مرکز (Centrifugal Force) تولید شده توسط این اجسام در بخشهای منحنی مسیر.
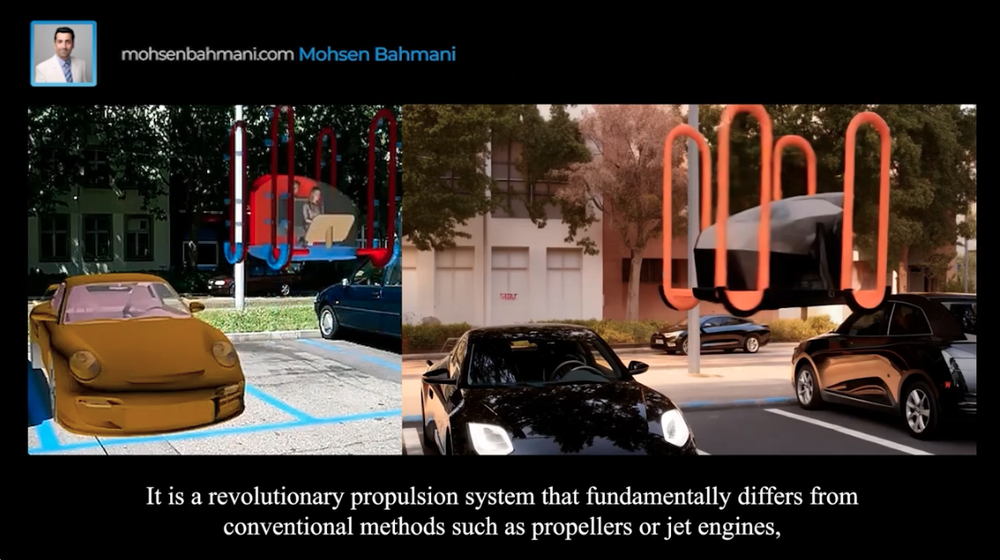
بهمنی در مصاحبه با بامداد اسماعیلی به مفهومی بودن ایده اشاره میکند. بنابراین جز بررسی پتنتها، چیز دیگری برای راستیآزمایی وجود ندارد. مفهوم اصلی در پتنتها، همانطور که در وبسایت او، ویدیوهای تبلیغاتی و مقالات رسانهای توصیف شده، شامل «موتورهای جت الکتریکی کوچکی است که در یک مسیر بسته حرکت کرده و از طریق نیروی گریز از مرکز، نیروی رانش تولید میکنند». با بررسی جامع وبسایت و حسابهای کاربری محسن بهمنی در شبکههای اجتماعی و پتنتهای فوق هسته اصلی ادعاهای فنی او درباره سیستم پیشران را میتوان در موارد زیر خلاصه کرد:
- فناوری بدون پروانه (Propeller-Free): مهمترین ویژگی ادعایی این سیستم، عدم استفاده از هرگونه پروانه، ملخ یا توربین برای تولید نیروی رانش است. این موضوع آن را از تمام فناوریهای رایج پروازی مانند هواپیما، بالگرد و پهپادهای مولتیروتور متمایز میکند.
- مبنای علمی بر اساس قانون سوم نیوتون: آقای بهمنی مکررا تاکید میکند که اختراع او کاملا بر پایه «قانون سوم نیوتون» (قانون عمل و عکسالعمل) استوار است. او این قانون را سنگ بنای علمی دستاورد خود معرفی میکند.
- عملکرد انقلابی و کارآمدی بالا: ادعا میشود این سیستم قادر به تولید نیروی رانش (Thrust) بسیار بالایی است که نه تنها برای حرکت افقی، بلکه برای غلبه بر نیروی جاذبه و بلند کردن یک وسیله نقلیه سنگین (Lift) نیز کافی است.
- سکوت، ایمنی و هزینه پایین: از دیگر مزایای ادعایی این سیستم میتوان به عملکرد تقریبا بیصدا، ایمنی بیشتر به دلیل حذف قطعات متحرک خارجی و هزینه تولید و نگهداری پایینتر نسبت به موتورهای جت یا سیستمهای ملخی اشاره کرد.
طبق متن پتنت و اظهارات عمومی، چند «موتور واکنشی کوچک و بلوک وزنه» روی یک ریل حلقهبسته حرکت میکنند، در راستای مستقیم، شتاب میگیرند، در پیچ نخست با سرعت بالا میگذرند تا «نیروی گریز از مرکز بزرگ» به بدنه وارد شود؛ در راستای بعدی، کُند میشوند یا «چتر ترمزی» باز میکنند و از پیچ دوم با سرعت کم رد میشوند تا نیروی گریز از مرکز مخالف ناچیز باشد. نتیجه ادعایی «برآیند نیروی یکسویه» و رانش خالص به سمت دلخواه است.
قلب این سیستم یک چرخه پیوسته و چهار مرحلهای است. هر موتور واکنشی بهمنی-وفایی به طور مداوم چهار مرحله زیر را تکرار میکند تا نیروی رانش ایجاد شود.
- مرحله اول: شتابگیری. موتورهای واکنشی با استفاده از منبع انرژی خود (مثلا یک پیشرانه جت الکتریکی کوچک) در اولین بخش مستقیم مسیر، فعال شده و تا سرعت بالایی شتاب میگیرند. این شتابگیری کاملا مستقل از مسیر انجام میشود.
- مرحله دوم: تولید نیرو. موتورهای پرسرعت وارد اولین بخش منحنی مسیر میشوند. از آنجایی که مسیر آنها را مجبور به دور زدن میکند، یک نیروی گریز از مرکز قدرتمند به سمت بیرون به دیواره مسیر وارد میکنند. این مرحله اصلی تولید نیرو است که در آن انرژی جنبشی موتور به نیروی محرکه برای کل سیستم تبدیل میشود.
- مرحله سوم: کاهش سرعت. موتورها اکنون در بخش مستقیم دوم حرکت میکنند و سرعتشان به طور چشمگیری کاهش مییابد. این کار به روشی بهینه و بدون مصرف انرژی اضافی، مثلا با استفاده از مقاومت هوا با ترمز هوایی (Airbrake)، انجام میشود.
- مرحله چهارم: بازگشت. موتورها که اکنون بسیار آهسته حرکت میکنند، از بخش منحنی دوم عبور میکنند. نکته کلیدی اینجاست: چون سرعت آنها بسیار پایین است، تقریبا هیچ نیروی گریز از مرکزی به این سمت از مسیر وارد نمیکنند. این عدم تعادل بین نیروی زیاد تولید شده در مرحله ۲ و نیروی ناچیز در مرحله ۴، راز اصلی عملکرد کل سیستم است. سپس این چرخه از نو آغاز میشود.
با قرار دادن چندین موتور در مسیر که هر کدام در یکی از این مراحل قرار دارند، این فرایند از یک سری ضربههای ناپیوسته به یک نیروی رانش مداوم تبدیل میشود.
برای درک اصل اساسی، تصور کنید وزنهای را به یک ریسمان بستهاید و آن را بالای سر خود میچرخانید. در حین چرخش، ریسمان دست شما را به سمت بیرون میکشد. حالا تصور کنید که میتوانستید کاری کنید که ریسمان فقط در نیمی از مسیر چرخش، دست شما را با قدرت بکشد و در نیمه دیگر مسیر، کاملا شل شود. اگر میتوانستید این کار را به طور مداوم تکرار کنید، یک کشش خالص و یکطرفه احساس میکردید. این پتنت دقیقا مدعی این ایده است: این سیستم با هوشمندی، نیروها را در یک حلقه بسته طوری مدیریت میکند که یک نیروی یکطرفه خالص ایجاد شود. این کار با استفاده از نیروی گریز از مرکز انجام میشود، اما تنها در یک سمت از سیستم.
تکامل پتنت بهمنی-وفایی با استفاده از نیروی گریز از مرکز
در پتنت WO2018091962 صریحا مینویسد «چند موتور واکنشی روی ریل حلقوی حرکت میکنند و انرژی جنبشی خود را به ریل منتقل کرده و نیروی یکسو ایجاد میکنند» این همان گزارهایست مه نسان خواهیم داد شبهعلمی است. علاوه بر پتنتهای مشترک بهمنی، وفایی EP3565971B8/WO2018091962، یک پتنت آمریکایی قدیمیتر با شماره US8272283B2 نیز وجود دارد که بر «ارتعاش با نیروی گریز از مرکز» متمرکز است. این ردیفکردن پتنتها نشان میدهد این ایده از یک مفهوم «ارتعاش-نیروی یکطرفه» به سمت «ریل حلقهای با واحدهای متحرک» تکامل ادعایی یافته؛ اما هیچکدام اثبات کارکرد مهندسی به معنای پرواز آزاد نیستند. بیشتر نشان میدهد وفایی تلاش کرده ایرادهای مفهومی پتنت اول را با همکاری بهمنی، در یک دهه بعد اصلاح کند.
در اینجا مجددا لازم به ذکر است که ثبت پتنت، اثبات مهندسی و عملیاتی نیست؛ و در سایت ثبت اختراعات اروپا تاکید میشود «پتنت صرفا حق منع دیگران است و هیچگونه تایید و مجوز کاربردی یا صحهگذاری فنی به همراه ندارد». فرایند بررسی در این نهادهای ثبت اختراعات، تنها متکی به اسناد ارائه شدهاست، نه آزمایش عملکرد در آزمایشگاه.
این پتنت سه مکانیسم اصلی را برای دستیابی به هدف خود پیشنهاد میکند که هر یک رویکرد متفاوتی برای ایجاد عدم تعادل کنترلشده و تولید نیروی یکطرفه دارند:
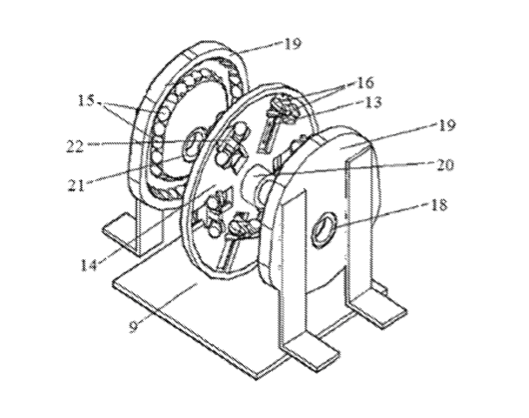
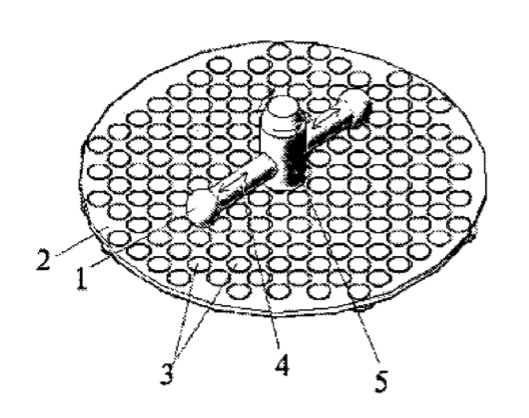
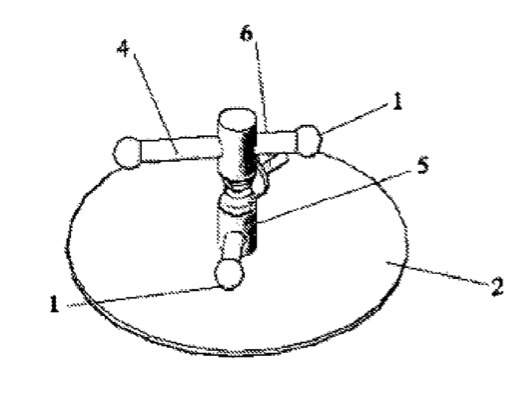
- شفت لغزنده و بخش دوار: این مکانیسم بر اساس تغییر پویای شعاع چرخش در طول یک دوران واحد عمل میکند. یک شفت لغزنده در حین چرخش، طول خود را نسبت به مرکز دوران تغییر میدهد. با افزایش طول شفت در یک سمت از چرخش (ایجاد شعاع بزرگتر و در نتیجه نیروی گریز از مرکز بیشتر) و جمع شدن آن در سمت مقابل (ایجاد شعاع کوچکتر و نیروی کمتر)، یک نیروی خالص یکطرفه در هر چرخه کامل تولید میشود. پتنت این فرآیند را تبدیل نیروی گریز از مرکز «منفی» به نیروی «مثبت» توصیف میکند. کنترل این حرکت لغزشی میتواند به صورت مکانیکی (با استفاده از بادامکها و یاتاقانها) یا به صورت الکترومغناطیسی (با استفاده از سلولهای الکترومغناطیسی یا بوبینها) انجام شود.
- دیسک دوار با لغزندههای جرمی: در این روش، یک دیسک دوار شیارهایی دارد که لغزندههای جرمی در آنها به صورت خطی حرکت میکنند. موقعیت این لغزندهها در حین چرخش دیسک توسط پوستههای خارجی ثابت و با استفاده از نیروهای مغناطیسی کنترل میشود. این طراحی باعث میشود که جرمها در یک سمت از چرخش از مرکز دورتر و در سمت دیگر به مرکز نزدیکتر باشند و این عدم تعادل مداوم، یک نیروی یکطرفه ایجاد میکند. برای کاهش اصطکاک و نویز، پتنت به شناور کردن لغزندهها به صورت «بالشتک هوا» با استفاده از نیروهای دافعه مغناطیسی اشاره میکند.
- مسیر حلقوی با جرمهای مستقل: این مکانیسم که پایهی پتنت بعدی را تشکیل میدهد، از جرمهایی استفاده میکند که به طور مستقل در یک مسیر حلقوی حرکت میکنند. نیروی محرکه این جرمها توسط یک منبع خارجی مانند جت یا پروانه (فن) تامین میشود که به خود جرمها متصل هستند. جرمها در یک بخش از مسیر شتاب میگیرند و در بخش منحنی با سرعت بالا حرکت میکنند تا نیروی گریز از مرکز تولید کنند و در بخش دیگر مسیر سرعت خود را کاهش میدهند. برای حذف اصطکاک فیزیکی و موقعیتیابی دقیق جرمها، از آهنرباهایی بر روی جرمها و مسیر استفاده میشود.
پتنت اولیه روشهای کنترلی متنوعی را متناسب با هر مکانیسم پیشنهاد میدهد. این روشها شامل کنترل کاملا مکانیکی با استفاده از بادامک و یاتاقان، کنترل الکترومغناطیسی با استفاده از بوبینهایی که با یک پردازنده مدیریت میشوند و کنترل نیروی واکنش از طریق تنظیم نیروی خروجی است. مکانیسم «مسیر حلقوی با جرمهای مستقل» در پتنت وفایی به نقطه کانونی پتنت تکاملیافته بهمنی-وفایی تبدیل شدهاست.
چرا ادعای بهمنی-وفایی با طبیعت مشکل بنیادین دارد؟
براساس قانون اول نیوتون، برای هر سامانه ایزوله (بدون نیروی خارجی خالص)، مرکز جرم با سرعت ثابت حرکت میکند؛ نیروهای داخلی حتی اگر بسیار بزرگ و پیچیده باشند، نمیتوانند مسیر مرکز جرم را تغییر دهند. این نتیجه مستقیم اصل پایستگی تکانه (بقای اندازهحرکت خطی) و قانون اول و سوم نیوتون است و در منابع استاندارد فیزیک بهوضوح آمده است. قانون سوم نیوتون میگوید هر کنشی واکنشی برابر و خلاف جهت دارد. صورتبندی عامتر این قانون، اصل پایستگی تکانه است که میگوید در یک سیستم بسته (بدون نیروی خارجی خالص) تکانه کل ثابت میماند و مرکز جرم نمیتواند خودبهخود شتاب بگیرد. نتیجه عملی اینکه اگر پیشران شما فقط از جرمهای داخلی تشکیل شده که روی ریل بسته خودش حرکت میکنند، نمیتوانید در خلا، نیروی پیشران خالص ایجاد کنید. این اصل در متون استاندارد فیزیک بهروشنی بیان شده و چند شده است که با دقت بسیار بالا آزموده شده است.
سامانه ادعایی بهمنی-وفایی (ریل، بدنه و واحدهای متحرک روی ریل) یک سیستم بسته هستند و تا وقتی جرمی را به بیرون پرتاب نکند یا با محیط تعامل بیرونی نداشته باشند، تمام نیروها داخلیاند. براساس قوانین مسلم فیزیک، نیروی گریز از مرکز جرم بر دیواره ریل و نیروی مرکزگرایی که ریل به جرم وارد میکند یک جفت کنش-واکنش داخلی است و برآیند آنها بر کل سامانه صفر است. پس مرکز جرم سامانه حرکت خالص پیدا نمیکند. بنابراین رانش خالص نمیتواند از چرخه داخلی این دستگاه حاصل شود.
۱) تخطی از قانون سوم نیوتن
طبق قانون سوم نیوتون: «هر عملی را عکسالعملی است؛ به همان اندازه اما در خلاف جهت». برای ایجاد نیروی پیشران، یکی از نیروهای زوج کنش-واکنش باید بر یک جرم خارجی (جرم واکنشی) اعمال شود. برای مثال، یک موشک گازهای داغ را به بیرون پرتاب میکند، یک ملخ هوا را به عقب میراند و یک شناگر به آب یا دیواره استخر نیرو وارد میکند. تمام سیستمهای پیشران موجود در جهان، از موتور جت و راکت گرفته تا بالهای یک پرنده و پروانههای یک پهپاد، بر اساس همین قانون کار میکنند. قانون عمل و عکسالعمل بیان میکند که برای ایجاد یک نیرو (عمل)، باید یک نیروی مساوی و در جهت مخالف (عکسالعمل) وجود داشته باشد. برای حرکت به جلو، یک سیستم پیشران باید جرمی (مانند هوا یا گازهای داغ) را به عقب پرتاب کند.
خطای اساسی در ادعای بهمنی در اینجا آشکار میشود: تمام نیروهای تولیدشده در دستگاه او (مانند نیروی جرمهای متحرک بر روی مسیر و نیروی مساوی و مخالف مسیر بر جرمها) داخلی هستند. نیروهای داخلی همواره بهصورت زوجهای متعادل وجود دارند که برآیند آنها صفر است و بنابراین نمیتوانند حرکت مرکز جرم سیستم را تغییر دهند. بنابراین در ادعای بهمنی-وفایی، با کاربر یا بیان نادرستی از قانون سوم نیوتون مواجه هستیم.
صرف استناد به قانون سوم نیوتون هیچ چیز جدید یا انقلابی را ثابت نمیکند. مشکل زمانی آغاز میشود که یک سیستم «بسته» ادعا کند که بدون پرتاب هیچ جرمی به بیرون، میتواند نیروی رانش خالص تولید کند.
۲) تخطی از قانون پایستگی تکانه
برای ایجاد حرکت، سیستم باید با اعمال نیرو بر یک عامل خارجی (مانند پرتاب کردن هوا به عقب)، یک نیروی عکسالعمل خارجی دریافت کند. هر ادعایی مبنی بر حرکت بدون این تعامل خارجی، قانون پایستگی تکانه را که نتیجه مستقیم قوانین نیوتون است، نقض میکند.
یک «سیستم بسته» سیستمی است که جرم آن ثابت بوده و هیچ نیروی خارجی خالصی بر آن وارد نشود. دستگاه بهمنی، زمانی که برای پرواز در خلا تصور شود، نمونه کاملی از یک سیستم بسته است. قانون پایستگی تکانه خطی بیان میکند که تکانه کل یک سیستم بسته ثابت باقی میماند. اگر وسیله نقلیه از حالت سکون (تکانه صفر) شروع به حرکت کند، تکانه کل آن باید صفر باقی بماند، مگر آنکه نیرویی خارجی بر آن اعمال شود. این ادعا از نظر فیزیکی معادل این است که فردی سعی کند با کشیدن بند کفشهای خود، خودش را از زمین بلند کند. این تمثیل بهخوبی نشان میدهد که چرا تلاش برای حرکت با استفاده از نیروهای داخلی بینتیجه است: نیروی رو به بالایی که به بند کفش وارد میشود، با نیروی رو به پایینی که از طریق بدن به زمین منتقل میشود، خنثی میشود.
۳) بیان نادرست از نیروی گریز از مرکز
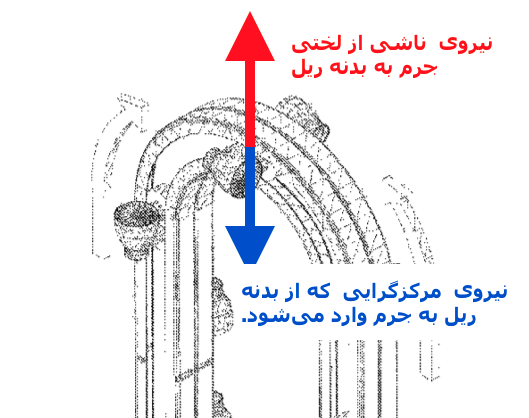
به نظر میرسد اینجا با یک بیان نادرست از نیروی «گریز از مرکز» به عنوان یک نیروی مولد مواجه هستیم. نیروی گریز از مرکز یک نیروی واقعی نیست، بلکه یک نیروی ظاهری یا شبهنیرو (Fictitious Force) است که تنها در یک چارچوب مرجع چرخان (غیرلخت) مشاهده میشود. نیروی واقعی که در اینجا وجود دارد، نیروی مرکزگرا (Centripetal Force) است؛ نیرویی که مسیر به جسم وارد میکند تا مسیر حرکت آن را خم کرده و آن را وادار به حرکت دایرهای کند (بردار آبیرنگ در تصویر بالا).
«گریز از مرکز» در چارچوب مرجع غیر اینرسی (چرخان) به صورت یک نیروی لختی موثر ظاهر میشود؛ از دید ناظر لخت، نیروهای واقعی یعنی همان تماس عمل (بردار قرمز) و عکیالعمل روی ریل (بردار آبی) و مجموعشان در طول حلقه صفر است. چیدمان جرمها روی مسیر منحنی، اگرچه نیروهای موضعی بزرگی به اجزای داخلی میدهد، اما تا وقتی که به بیرون جرم یا تکانه منتقل نشود، نیروی پیشران خالص به سامانه نمیدهد. نهایتا دامنه نوسان حول مرکز جرم را زیاد میکند. اما پیشران واقعی تولید نمیکند.
بنیان توصیفی «استفاده از نیروی گریز از مرکز برای تولید نیروی یکسو» از نظر چارچوبهای مرجع، نیروی لختی کاذب (شبهنیرو) در دستگاه شتابدار است؛ در دستگاه لخت، تنها نیروهای واقعی (تماس، گرانش و پیشران واکنشی) معنا دارند که در اینجا جمعشان در کل حلقه در پتنت بهمنی-وفایی صفر است. پس «چیدمان بلوکهای وزنه روی مسیر منحنی» در بهترین حالت، نیروهای داخلی را چپ و راست میکند اما نیروی «خالص» رو به جلو ایجاد نمیکند (برای همین است که ویدیوهای یوتیوب تقطیعشده هستند و با آغاز حرکت بازگشتی، تصویر قطع میشود!)
۴) تحلیل نادرست نیروها
کل ادعای این اختراع بر ایجاد یک نیروی خالص رو به جلو در یک چرخه کامل استوار است. با این حال، تحلیل کامل نیروها (در فیزیک پایه ۱ در دانشگاه تدریس میشود) نشان میدهد که این امر، صرفنظر از مکانیزم مورد استفاده برای شتابدهی یا کاهش سرعت، غیرممکن است. برای مرحله کاهش سرعت، دو سناریوی ممکن وجود دارد:
- سناریو الف (ترمز داخلی): اگر «موتورهای واکنشی» توسط یک مکانیزم داخلی (مانند ترمز الکترومغناطیسی) کند شوند، قانون سوم نیوتن حکم میکند که نیروی ترمز وارد بر موتور، یک نیروی عکسالعمل برابر و در جهت مخالف، یعنی یک نیروی رو به جلو، بر روی مسیر ایجاد میکند. این نیروی رو به جلو، دقیقا نیروی رو به عقبی را که در مرحله شتابگیری اولیه ایجاد شده بود، خنثی میکند.
- سناریو ب (ترمز خارجی از طریق مقاومت هوا): اگر کاهش سرعت با استفاده از یک محیط خارجی، همانطور که «ترمز هوایی» پیشنهاد میکند، انجام شود، سیستم دیگر بسته نیست. پروانه یا جت یا نازل منفعل نیروی پسا (Drag) ایجاد میکند که موتور را کند میکند. با این حال، این تعامل منجر به یک نیروی خالص رو به عقب \ بر کل وسیله نقلیه میشود که مستقیما با نیروی پیشرانه مخالفت میکند. در این حالت، سیستم در عمل به یک ترمز هوایی بسیار ناکارآمد تبدیل میشود، نه یک موتور.
اگر هم که ادعا شود که تعامل با هوا یا محیط، نقش جرم واکنشی را بازی کند کلا نقض غرض بوده و گمراهکننده است. اولا اگر تعامل با هوا منبع رانش باشد، دیگر پیشران «بدون ملخ-پروانه» و «سوخت بسیار کم» معنایش عوض میشود و باید تراست خالص و توان ویژه گزارش شود. چنین گزارشها و تحلیلهای فنی وجود ندارد. ضمن آنکه طرح ادعا مشخصا انتقال تکانه داخلی روی ریل را انگیزه اصلی میداند، نه جت آیرودینامیکی کلاسیک. ثانیا اگر هم قرار به استفاده از پیشران جت یا ملخ بود هم بستن آن به ریل، اضافی است و کافیست موتور پیشران را روی جسم فیکس کنند تا از زمین بلند شود. اما میدانیم این نوع پیشران قبلا ابداع شده و هلیکوپتر یا مدل چهار تاییش همان کوادکوپتر است.
۵) مرتبه بزرگی نیرو یا توان مورد نیاز
برای پرواز عمودی پایدار باید مجموع نیروی پیشران بیش از وزن باشد. حتی اگر بدنه آزمایشی فقط ۱۰ کیلوگرم باشد، حداقل نیروی لازم برای کندن از زمین بیش از ۹۸ نیوتن است؛ برای بلند شدن با شتاب ملایم، کمی بیشتر. در دستگاههای نمایشدادهشده، نیرویی که از تراست موضعی «بلوکهای کوچک» به ریل منتقل میشود داخلی است و به نیروی خالص عمودی بدل نمیشود. آنچه میماند، هر اثر جانبی آیرودینامیکی یا اصطکاکی محیطی است که در بهترین حالت چند نیوتن و همانطور که گفتهشد افقی و موضعی است؛ بههیچوجه با الزامات پرواز وسیله سرنشیندار و خودرو (در کلیپ منصوری) همخوان نیست (مانند حرکت ریل در روی زمین در ویدیوهای یوتیوب کانال بهمنی).
در پتنت آلمانی وفایی، گفته شده هر واحد رانش در فاز شتابگیری ۱۰ متری، به سرعت ۲۹ متر بر ثانیه میرسد، در آن بازه «۷۶ گرم سوخت» میسوزاند و «برای تولید نیروی ۸۵۰۰ نیوتن باید در هر ثانیه ۹ واحد از بخش قوسی ریل عبور کنند». این یعنی مصرف سوخت کلی حدود ۰/۶۸۴ کیلوگرم بر ثانیه. با چگالی انرژی سوخت جت (حدود ۴۳ مگاژول بر کیلوگرم) نرخ توان ورودی میشود تقریبا ۲۹ مگاوات. اگر قرار باشد با چنین توانی «نیروی خالص ۸۵۰۰ نیوتن» تولید شود، باید سرعت مؤثر جریانِ خروجی در حد ۳۴۶۰ متر بر ثانیه باشد (بیش از ۱۰ ماخ). این سناریو در هوا غیر عملی است و با هیچ هندسه معقولی از اگزاست یا یونباد جور درنمیآید. ضمن آنکه خود سند اذعان میکند بخش بزرگی از چرخه، صرف «کندکردن با ترمز هوایی» میشود!
۶) مغالطه مرکز جرم
خطای بنیادی این پتنت و دستگاههای مشابه، در نادیده گرفتن مفهوم «مرکز جرم» یک سامانه نهفته است. مرکز جرم یک سامانه، نقطه میانگین موقعیت تمام جرمهای تشکیلدهنده آن است. بر اساس قوانین نیوتن، تا زمانی که هیچ نیروی خارجی به یک سامانه بسته وارد نشود، مرکز جرم آن نمیتواند شتاب بگیرد یا موقعیت خود را تغییر دهد، هرچند نیروهایی شدیدی در داخل سیستم منجر به تغییر ظاهری آن شود. هیچ چرخه مکانیکی داخل یک چارچوب بسته (از جمله «جرمهای شتابگیرنده روی ریل») در حالت شناور و آزاد، رانش خالص تولید نمیکند.
درون دستگاه مورد بحث، تمام نیروها داخلی هستند. هنگامی که وزنه به سرعت به یک سمت حرکت میکند (عمل)، جعبه نیز در جهت مخالف کمی پس میزند (عکسالعمل). این اصل، تجلی قانون سوم نیوتن است. در طول یک چرخه کامل حرکت وزنه (حرکت آرام به یک سمت و بازگشت سریع)، مجموع تمام این حرکات داخلی دقیقاً یکدیگر را خنثی میکنند. در نتیجه، مرکز جرم کل سامانه (جعبه و وزنه) هیچ تغییری نکرده و هیچگونه رانش خالصی تولید نمیشود. بهمنی نیروی داخلی بزرگ و قابل اندازهگیری در یک بخش از چرخه را با یک نیروی خارجی خالص بر کل سامانه اشتباه گرفته است.
در حقیقت برخلاف نظر بهمنی که صراحتا در مصاحبه با بامداد اسماعیلی میگوید «این اختراع براساس قانون سوم نیوتن کار می کند»، برعکس «قانون سوم نیوتن نشان می دهد این اختراع عمل نمیکند و این ادعا شبهعلم است».
گفتن اینکه «این سازوکار بر اساس قانون سوم نیوتن کار میکند» چیز تازهای نمیافزاید؛ همه طبیعت براساس قانون سوم نیوتن عمل می کند و همه پیشران هایی که بشر ابداع کرده یا به کار گرفته (از اسبی که به گاری بسته شده تا پیشران پلاسمایی و هستهای) در نهایت به برهمکنش با یک محیط یا میدان خارجی و تبادل تکانه تکیه دارند. اسب برای جلو رفتن گاری، سمش را روی زمین به عقب فشار میدهد و موتور پلاسمایی، برای پیش بردن فضاپیما، یونها را با میدان الکترومغناطیسی، به عقب پرتاب میکند.
چرا ویدیوها «حرکت افقی» نشان میدهند؟
بهمنی چندین ویدیو از آزمایش نمونههای اولیه سیستم خود منتشر کرده است. تحلیل این ویدیوها، نکات بسیار مهمی را آشکار میسازد. در تمام این آزمایشها، دستگاه روی یک سطح صاف (مانند کف یک کارگاه یا روی میز ناهارخوری) یا یک سطح شیبدار با زاویه بسیار کم قرار دارد و حرکت آن صرفا افقی است. دستگاه با لرزش و تولید صدا، مسافت کوتاهی را روی زمین (یا شیب بسیار کم) میلرزد و به جلو میخزد؛ این الگو امضای کلاسیک حرکت چسبندگی-لغزشی (Stick–slip) است. در چنین آرایشهایی، آنچه دیده میشود اغلب اثرهای غیرمتقارن اصطکاک روی سطح، یا برهمکنش با هوا یا کابل یا زمین است؛ در حالت بیتکیهگاه، اثر به صفر میل میکند.

حرکت داخلی باعث میشود دستگاه در یک نیمچرخه «بچسبد» و در نیمچرخه دیگر «لغزش» رخ دهد و خزیدن افقی شکل بگیرد. این «رانش» نیست و در محیط بیاصطکاک و معلق مثلا در جو یا خلا ناپدید میشود. همین توضیح تاریخی برای ادعای شبهعلمی «Dean Drive» که در دهه ۱۹۵۰ ادعای مشابهی را مطرح کرده بود نیز داده شدهبود.
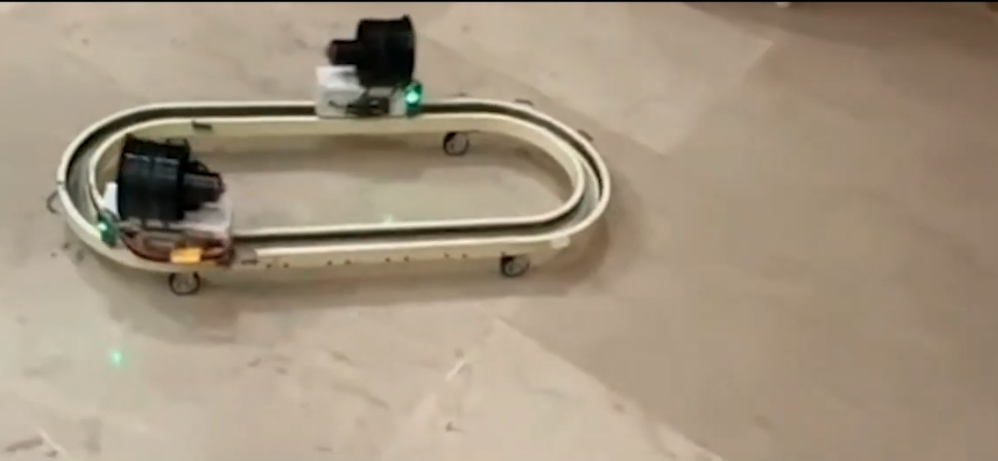
بررسی شواهد ویدیویی نشان میدهد که تمام نمونههای اولیه بهصورت افقی یا بر روی یک سطح با شیب کم حرکت میکنند و هرگز قادر به بلند شدن عمودی در برابر گرانش نیستند. این نوع حرکت، مشخصه «پدیده چسب-لغز» (Stick-slip) است. ارتعاشات داخلی دستگاه باعث میشود که بر اصطکاک ایستایی در یک جهت آسانتر از جهت دیگر غلبه کند و در نتیجه، روی سطح بخزد. این در حالی است که برای بلند کردن یک وسیله نقلیه با جرم قابلتوجه، به نیروی رانش پیوسته و عظیمی نیاز است و نیرو باید بزرگتر از حاصلضرب جرم در شتاب گرانش باشد. این ادعا صرفا اشتباه نیست، بلکه نشاندهنده یک سوءبرداشت بنیادی در این ادعا از تفاوت بین نیروهای داخلی و خارجی است که یکی از ابتداییترین مفاهیم فیزیک مقدماتی به شمار میرود.
مشابههای تاریخی
ادعاهای «پیشران بدون واکنش» بارها آزموده شدهاند. نمونه جنجالی «EmDrive» در آزمایشگاههای مستقل (از جمله گروه تاجمار در درسدن) پس از حذف اثرات گرمایی و کابلی به اندازهگیری صفر در حد دقت ابزار رسید. در ادبیات فنی، چنین ادعاهایی را ذیل «Reactionless drive» طبقهبندی و دلایل فیزیکی رد آن را توضیح داده است.
فکتنامه پیش از این این ادعا را بررسی کرده بود؛ زمانی که کاربران مشهور به «ارزشی» رد مقطعی ناشی از عملکرد ناقص موتور موشک ذوالجناح را به تست پیشران فناوری بدون سوخت به دست سپاه پاسداران انقلاب اسلامی، توصیف کرده بودند:
این ایده اغلب با ماشین حرکت دائمی مقایسه میشود، زیرا وعده تولید حرکت از هیچ (یعنی بدون دفع جرم واکنشی) را میدهد و قانون پایستگی انرژی را نقض میکند. جذابیت روانشناختی این دستگاهها در وعده انقلابی آنها برای سفر یا انرژی تقریبا رایگان نهفته است که به میل مشترک بشر برای غلبه بر محدودیتهای فیزیکی بنیادین پاسخ میدهد.
۱) پیشرانه دین (Dean Drive)
در دهه ۱۹۵۰، مخترعی به نام نورمن دین (Norman Dean) دستگاهی به نام «پیشرانه دین» را معرفی کرد که دقیقا بر همین اصل اشتباه استوار بود. دین ادعا میکرد که دستگاهش یک پیشرانه بدون واکنش است، اما هرگز اجازه تحلیل مستقل آن را نداد. بعدها مشخص شد که «رانش» مشاهدهشده در نمایشهای او، نتیجه اصطکاک دستگاه با سطحی بود که روی آن قرار داشت (stick-slip motion). شرح دستگاه مکانیکی نورمن دین شباهتهای آن با ادعاهای بهمنی-وفایی آشکار میکند: یک دستگاه مکانیکی با استفاده از وزنههای نوسانی و چرخشی داخلی، تولید ارتعاش قابلتوجه، و تکیه شدید بر تبلیغات رسانهای بهجای توضیح دقیق پدیده برای مراجع همتاداوری.
۲) پیشرانه اثر ماخ (MET)
پیشرانه اثر ماخ (Mach Effect Thruster یا MET) که توسط جیمز اف. وودوارد (James F. Woodward) مطرح شده است. این مطالعه موردی به خوبی نشان میدهد که چگونه علم گمانهزن (Speculative science) میتواند به مرز شبهعلم نزدیک شود و چه خطاهای سیستماتیکی در این نوع آزمایشها رایج است. برخلاف پیشرانههای مکانیکی ساده، نظریه MET بر پایه فیزیک مدرن و پرسشهای حلنشده بنیادی در لب مرز کیهانشناسی بنا شده است.
- اصل ماخ و منشا اینرسی: این نظریه با یک ایده گمانهزن اما مشروع در فیزیک آغاز میشود که به ارنست ماخ نسبت داده شده و اینشتین نیز آن را بررسی کردهاست. «اصل ماخ» بیان میکند که اینرسی یک جسم (مقاومت آن در برابر شتاب) ناشی از برهمکنش گرانشی آن با تمام جرمهای دیگر در کیهان است.
- اثر وودوارد: وودوارد بر این اساس فرضیهای را مطرح کرد که به «اثر وودوارد» معروف شد: اگر اینرسی یک پدیده گرانشی است، پس هنگامی که انرژی داخلی یک جسم (مثلا انرژی ذخیرهشده در یک خازن) به سرعت تغییر میکند و همزمان آن جسم شتاب میگیرد، جرم لختی (Inertial mass) آن باید به طور گذرا نوسان کند.
- «هل دادن عالم»: ایده اصلی MET این است که با ارتعاش دادن یک جسم (مجموعهای از خازنهای پیزوالکتریک) و زمانبندی دقیق نوسانات جرم آن، میتوان در زمانی که جسم «سنگینتر» است آن را به جلو هل داد و زمانی که «سبکتر» است آن را به عقب کشید. این کار، یک رانش خالص ایجاد میکند. وودوارد استدلال میکند که این فرآیند پایستگی تکانه را نقض نمیکند، زیرا دستگاه در حال تبادل تکانه با تمام جرمهای دیگر کیهان است و از کل کیهان به عنوان «جرم واکنشی» خود استفاده میکند. این «راه گریز» هوشمندانه، MET را از پیشرانههای مکانیکی ساده متمایز میکند. این ایده در پتنتهای وودوارد، تشریح شده است.
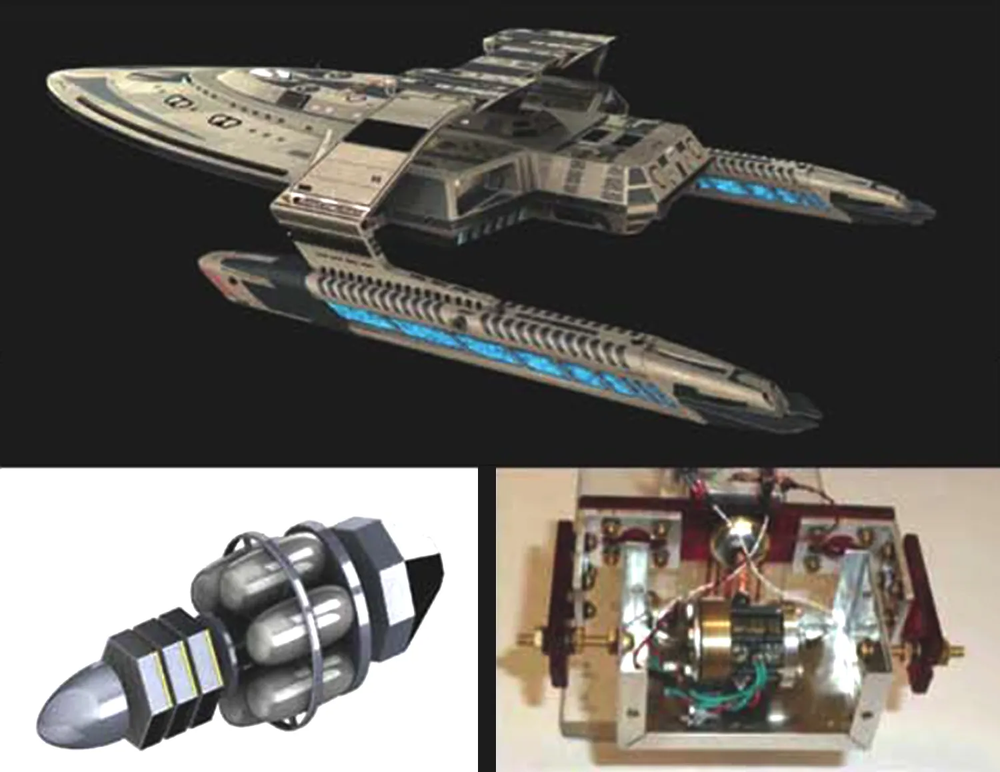
دستگاه آزمایشی MET معمولا از مجموعهای از دیسکهای پیزوالکتریک تشکیل شده که بین یک جرم واکنشی سنگین (معمولاً از جنس برنج) و یک درپوش سبکتر (معمولا از جنس آلومینیوم) فشرده شدهاند. با اعمال یک ولتاژ متناوب با فرکانس بالا، این مجموعه همزمان مرتعش شده و انرژی داخلی آن تغییر میکند. چالش اصلی، اندازهگیری نیروی رانش ادعایی است که در حد چند میکرونیوتن، یعنی نیرویی بسیار ناچیز، است. این کار نیازمند تجهیزات فوقالعاده حساسی مانند ترازوی پیچشی است که در شرایط خلا بالا کار میکنند تا از تاثیر جریانهای هوا جلوگیری شود.
وودوارد و همکارانش برای دههها گزارشهایی مبنی بر اندازهگیری رانشهای کوچک و غیرعادی منتشر کردهاند. این ادعاها به قدری جالب توجه بود که ناسا کمکهای مالی کوچکی را برای تحقیق در مورد آنها اختصاص داد. با وجود ادعاهای مطرحشده، این ادعا شکست خورد. یک قانون نانوشته در فیزیک تجربی وجود دارد: سیگنالهای بسیار کوچک و پرنویز که در حد آستانه تشخیص دستگاهها قرار دارند، به احتمال زیاد ناشی از خطاهای سیستماتیک هستند، نه یک پدیده فیزیکی جدید. منابع احتمالی خطا در آزمایشهای MET متعددند:
- اثرات حرارتی: دستگاه در حین کار داغ میشود. انبساط حرارتی نامتقارن و بسیار جزئی میتواند مرکز جرم دستگاه را جابجا کرده و روی ترازوی حساس، سیگنالی شبیه به رانش ایجاد کند.
- تداخل الکترومغناطیسی: جریانهای الکتریکی قوی که به دستگاه وارد میشوند، میتوانند با میدان مغناطیسی زمین یا قطعات فلزی دستگاه آزمایش برهمکنش کرده و نیروهای لورنتس کاذبی ایجاد کنند که به اشتباه به عنوان رانش ثبت میشوند.
- ارتعاش: دستگاه یک مرتعشکننده قوی است. هرگونه عدم تقارن در نحوه نصب آن میتواند منجر به همان پدیده «چسب-لغز» یا دیگر انواع جفت شدگی ارتعاشی با پایه آزمایش شود و حرکتی را ایجاد کند که پیشرانش واقعی نیست.
تأیید مستقل و قطعی این نتایج هرگز به دست نیامده است. آزمایش ناسا، هیچگونه رانش غیر عادی را تایید نکردند. نتایج متناقض بود. گاهی رانش در شرایطی که نباید وجود داشته باشد، مشاهده میشد و گاهی با چرخاندن ۱۸۰ درجهای دستگاه، جهت رانش معکوس نمیشد.
بررسی سوابق مالکیت فکری و هویت مهندسان
بررسی سوابق آقای بهمنی با استفاده از پروفایل لینکدین، وبسایت شخصی و گزارشهای رسانهای نشان میدهد که او مدرک کارشناسی ارشد مهندسی مکانیک از موسسه فناوری کارلسروهه (KIT) دارد. اختراع قبلی او، «کفشهای شناور» است که حتی در رسانه های ایران قبلا پوشش داده شدهبود. درحالیکه او ادعا میکند این اختراع برای او «میلیونها» دلار درآمد داشته، شواهد ارائهشده تنها شامل حضور در نمایشگاههای اختراعات و کلیپهای رسانهای قدیمی است. موفقیت تجاری و مبنای فناورانه این دستگاه در غیاب دادههای قابلتأیید بازار، مورد تردید است. جوایز متعددی که در وبسایت او فهرست شدهاند (مدال طلا در بروکسل، نقره در مسکو و غیره)، همگی از نمایشگاههای اختراعات هستند که رویدادهایی تجاری محسوب میشوند، نه کنفرانسهای علمی با داوری همتا. این جوایز به نوآوری و نحوه ارائه پاداش میدهند، نه لزوما به اعتبار علمی یا موفقیت تجاری.
در مورد همکاری با منصوری نیز تحلیل دقیق متن پست منتشر شده در سایت آنها نشان میدهد که این همکاری بیشتر در سطح ارائه یک طرح مفهومی و بصری (Concept Design) بوده و پست سایت منصوری به هیچوجه تایید فنی یا مهندسی مستقل از این سیستم پیشران اشاره نمیکند. مهمتر آنکه، این همکاری صرفاً در حوزه طراحی باقی مانده و هیچگونه صحبتی از تأیید فنی یا مشارکت مهندسی منصوری در ساخت پیشرانه به میان نیامده است؛ این یک نشانه هشدار کلیدی است که نشان میدهد حتی شریک تجاری معرفیشده نیز فناوری اصلی را تضمین نکرده است، بهخصوص که ۲ سال از آن زمان گذشته و هیچ نشانه ای از حتی یک پروتوتایپ ساده، دیده نمیشود.
تصویر از سمت راست به چپ: کوروش منصوری، بنیانگذار شرکت «MANSORY Design & Holding GmbH» و محسن بهمنی و حسین وفایی

در میان مدعیان شبهعلم، یک الگوی تکراری و فریبنده بارها دیده میشود: ارجاع به سرنوشت گالیله. آنان با تکیه بر روایتی تحریفشده از کشمکش گالیله و کلیسای کاتولیک، چنین وانمود میکنند که هر نظریهای که امروز از سوی جامعه علمی طرد میشود، ممکن است همانند نظریه خورشیدمرکزی، فردا حقیقتی بزرگ از آب درآید. این قیاس، از بنیاد گمراهکننده است. گالیله نه یک حاشیهنشین ضدعلم، بلکه یکی از بنیانگذاران روش علمی بود؛ آزمایش، مشاهده و استدلال ریاضی را بر باور و سنت ترجیح میداد. مخالفت با او نه از سوی دانشمندان، بلکه از نهاد مذهبیای برخاست که خود را صاحب حقیقت مطلق میدانست.
در جهان امروز، جامعه علمی بر پایه همان اصولی کار میکند که گالیله برای تثبیت آنها جنگید: سنجشپذیری، بازتولیدپذیری و نقد همتایان. طرد یک ادعا در فضای علمی، نه نتیجه قدرتطلبی یا تعصب، بلکه پیامد فقدان شواهد معتبر و روش تجربی است. قیاس میان نقد علمی و سانسور دینی، در واقع وارونگی تاریخ است: گالیله قربانی جزماندیشی شد، اما شبهعلم امروز قربانی کمبود داده و خطای روششناختی است.
پناه بردن به افسانه «گالیله زمانه خود بودن»، بیشتر از آنکه نشانی از نبوغ باشد، نشانه بیمیلی به پذیرش قواعد بازی علمی است. هر ادعایی میتواند مسیر گالیله را طی کند، اما تنها در صورتی که بتواند مانند او، از آزمون تجربه و منطق سربلند بیرون آید، نه با گلایه از بیاعتنایی جامعه علمی، بلکه با شواهدی که هیچ نهاد و عقیدهای نتواند نادیده بگیرد.
جمعبندی
در دنیای علم و مهندسی، هر ادعای بزرگی نیازمند شواهد بزرگ و قانعکننده است. صرف بیان یک ایده، هرچقدر هم که جذاب باشد، ارزشی ندارد مگر آنکه با دادههای قابل تکرار، آزمایشهای شفاف و تأییدیههای مستقل پشتیبانی شود.
شواهد ارائهشده (وبسایت شخصی، ویدیوها، پوششهای خبری تبلیغاتی، و خانوادهای از پتنتها) هیچ پرواز کنترلشده و بیتکیهگاه را نشان نمیدهند؛ سازوکار ادعایی در چارچوب یک سیستم بسته با اصول قطعی فیزیک (پایستگی تکانه و رفتار مرکز جرم) ناسازگار است؛ نشانههای رسانهای اعتبارسنجی علمی مستقل ندارند و بیشتر ماهیت تبلیغاتی دارند. جمعبندی پژوهشهای فیزیکی درباره «پیشرانهای بیواکنش» (Dean drive/EmDrive) نیز چنین الگوهایی را به خطاهای آزمایشی/اصطکاکی نسبت میدهد، نه نیروی رانش واقعی.
دستگاه توصیفشده در پتنتهای بهمنی-وفایی نمیتواند نیروی رانش تولید کند. این دستگاه یک سامانه بسته است و عملکرد آن تحت حاکمیت مطلق قانون پایستگی تکانه قرار دارد. این پتنت، تکرار مدرنی از یک مغالطه مکانیکی کلاسیک، مشابه پیشرانه دین، است و هیچ مبنای علمی معتبری ندارد. قانون سوم نیوتون این ادعا را نقض میکند.
ادعای اینکه این پتنت یک روش پیشرانش کارآمد را توصیف میکند، در دسته شبهعلم قرار میگیرد. دلایل این طبقهبندی عبارتند از:
- این ادعا در تضاد مستقیم با قوانین بنیادی و کاملا تثبیتشده علم (پایستگی تکانه) قرار دارد.
- فاقد یک مبنای نظری قابل قبول است.
- بار اثبات این ادعای خارقالعاده به هیچ وجه برآورده نشده و در واقع، این ادعا را فیزیک پایه رد میکند.
- استفاده از یک سند قانونی (پتنت) برای القای اعتبار علمی، یکی از تاکتیکهای رایج در ترویج شبهعلم است.
طرح «جرمهای داخلی روی مسیر حلقوی برای تولید نیروی یکسو» آنطور که در پتنتهای بهمنی-وفایی و وبسایت بهمنی توصیف شده، در چارچوب دستگاه ایزوله، نمیتواند پرواز کند. اگر فیلمی از «حرکت» میبینیم، یا اصطکاک و واکنش زمین در کار است، یا اثرات کمکی (مثلاً باد فنهای پنهان، کابل، تکیهگاه، …). برای این ادعا باید رانش خالص قابلتکرار در پلتفرم بیتکیهگاه و با کنترل حرارتی و ابزار دقیق نشان داده شود.
بنابراین ادعای محسن بهمنی و حسین وفایی مبنی بر «ابداع انقلابی نسل جدید پیشران بر مبنای قانون سوم نیوتون» و ویدیو منتشر شده در وبسایت منصوری، شبهعلم است و از فکتنامه نشان شاخدار میگیرد.
شاخدار
گفته یا آمار، به قدری نادرست و مضحک است که حتی مرغ پخته هم به خنده میافتد!
درباره نشانهای میرزاروش کار ما